Fehlermeldungen, Fehlersuche.
aktualisiert am 16.11.2019
Der Controller hat nur vier Fehlermeldungen. Ich habe bewusst darauf verzichtet lange Fehlerlisten einzubauen.
Zumal auch kaum Fehler aufteten können bzw. die notwendigen Meldungen per LED nachvollzogen werden können.
Folgende Fehlertexte gibt es:
-
Antrieb X CW ->
-
Antrieb X CCW <-
-
Antrieb Y CW
- Antrieb Y CCW
"CW" bzw. "CCW" geben die Laufrichtung an. CW = im Uhrzeigersinn, CCW = gegen den Uhrzeigersinn.
Soll sich ein Motor drehen, kontrolliert die Software, ob eine Rückmeldung der Hallsensoren erfolgt.
Bleibt die Rückmeldung aus, kann es verschiedene Gründe geben:
Um die Endstufe der Motoren und die Motoren selbst zu testen gibt es eine einfache Möglichkeit:
Mittels der Taster "MB1A", "MB1B" und "MB2A", "MB2B" lassen sich die Motoren manuell in die gewünschte Richtung ansteuern.
Es ist aber darauf zu achten, dass sich die Motoren frei drehen können bzw. der Antrieb nicht auf ein Hinderniss stossen kann.
Nach diesem Test muss die Anlage neu gestartet werden, das der Controller "nicht weiss" an welcher Position sich der Antrieb befindet!!!
Sollte der Motor nicht reagieren, liegt der Fehler in der Motoren-Endstufe oder am Motor selbst. In diesem Falle bleibt noch die Möglichkeit
mittels Vielfachmessgerät den Ausgang der jeweiligen Endstufe zu messen bzw. den Motor zu überprüfen und das defekte Teil auszutauschen.
Funktioniert der Test, liegt der Fehler entweder in der Ansteuerung der Motoren-Endstufe oder in der Rückmeldung der Hall-Sensoren.
Um die Encoder-Eingänge prüfen zu können hilft die LED 1.
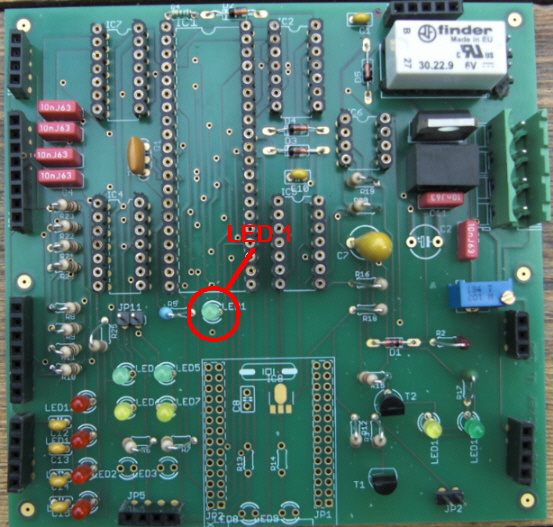 LED 1 leuchtet normalerweise im Sekundentakt.
LED 1 leuchtet normalerweise im Sekundentakt.
Läuft einer der Motoren, signalisiert LED 1 die Rückmeldung des Hallsensor bzw. des Encoder.
Man kann gute die Anfahrt- und Bremsrampe erkennen, da die LED im gleichen Takt wie die Signale anliegen blinkt.
Allerdings wird nicht die Richtung der Signaleingänge berücksichtigt. Sollten die Signaleingänge A und B der Encoder falsch angeschlossen sein,
Lässt sich dieses mittels der LED nicht feststellen. Hier hilft nur ein Tauschen der Kanäle A und B der Encoder.
Da ich die Schaltpläne offen gelegt habe, muss man sich nun auf die Fehlersuche begeben oder mir die Platine zur Überprüfung zusenden.
Es können weitere Fehler auftreten, die von der Software nicht erfasst werden können. Diese sind z.B. die Endschalter.
Die Schliesser der Enschalter müssen nur kleinste Ströme aushalten. Meist wird aber eine Mindest-Stromstärke gefordert um den
sogenannten Reinigungsefekt zu erzielen. Diese "Minimallasten" kann das Controllerboard aber nicht erfüllen, da nur kleinste Ströme fliessen.
Werden mechanische Endschalter eingesetzt sollten die Kontakte der Endschalter in Abständen von ca. 12 Monaten mit einem Lederstäbchen gereinigt bzw. poliert werden werden.
Diese Methode wirkt wirklich Wunder und so ein Lederstäbchen kostet nicht die Welt.
Die Lederstäbchen:
 Für knapp 40 Euro gibt es ca. 100 Lederstäbchen. Diese Menge reicht ein ganzes Leben.
Für knapp 40 Euro gibt es ca. 100 Lederstäbchen. Diese Menge reicht ein ganzes Leben.
Die Kontakte der Endschalter werden damit solange poliert bis die Kontaktkronen wieder glänzen.
Auf keinen Fall die Kontakte mit Schmirgelpaier oder einer Feile bearbeiten!
Das wäre der Tot der veredelten Kontaktstellen.
Auch sollte man auf Kontakt-Spray verzichten. Dieses Spray ist nicht für solche Kontakte geeignet.
Weitere Fehler lassen sich jetzt nur noch durch Messen der einzelnen Signale lokalisieren.
Da ich den Schaltplan offen gelegt habe, sollte es einem Profi leicht fallen einen Fehler zu finden.